
Программное обеспечение Universal Ground Control Software (UgCS), разработанное компанией SPH Engineering, Латвия, дает много возможностей в плане проектирования планов полета и управления БПЛА. Такими возможностями являются: планирование миссий различных типов (путевые точки, линейная, круговая, периметр, сканирование территории) с эффектом присутствия, планирование миссий для фотограмметрии, подтверждение полученных изображения с помощью оффлайн инструмента обработки данных, планирование и выполнение задания без подключения к интернету, импорт цифровой модели рельефа (для повышения точности и безопасности работы в режиме следования поверхности), импорт актуального ортофотоплана в качестве подложки карты, гоепозиционирование фотографий, запись и проигрывание телеметрии, создание собственных бесполетных зон и т.д [1, 3].
Для максимального упрощения процесса проектирования плана полета и управления полета БПЛА на экране присутствуют (рис. 1) [3]: слева – панель планирования маршрута; снизу – окно оповещений; справа вверху – окно команд и окно телеметрии, на котором отображаются все сведения о проводимом полете.
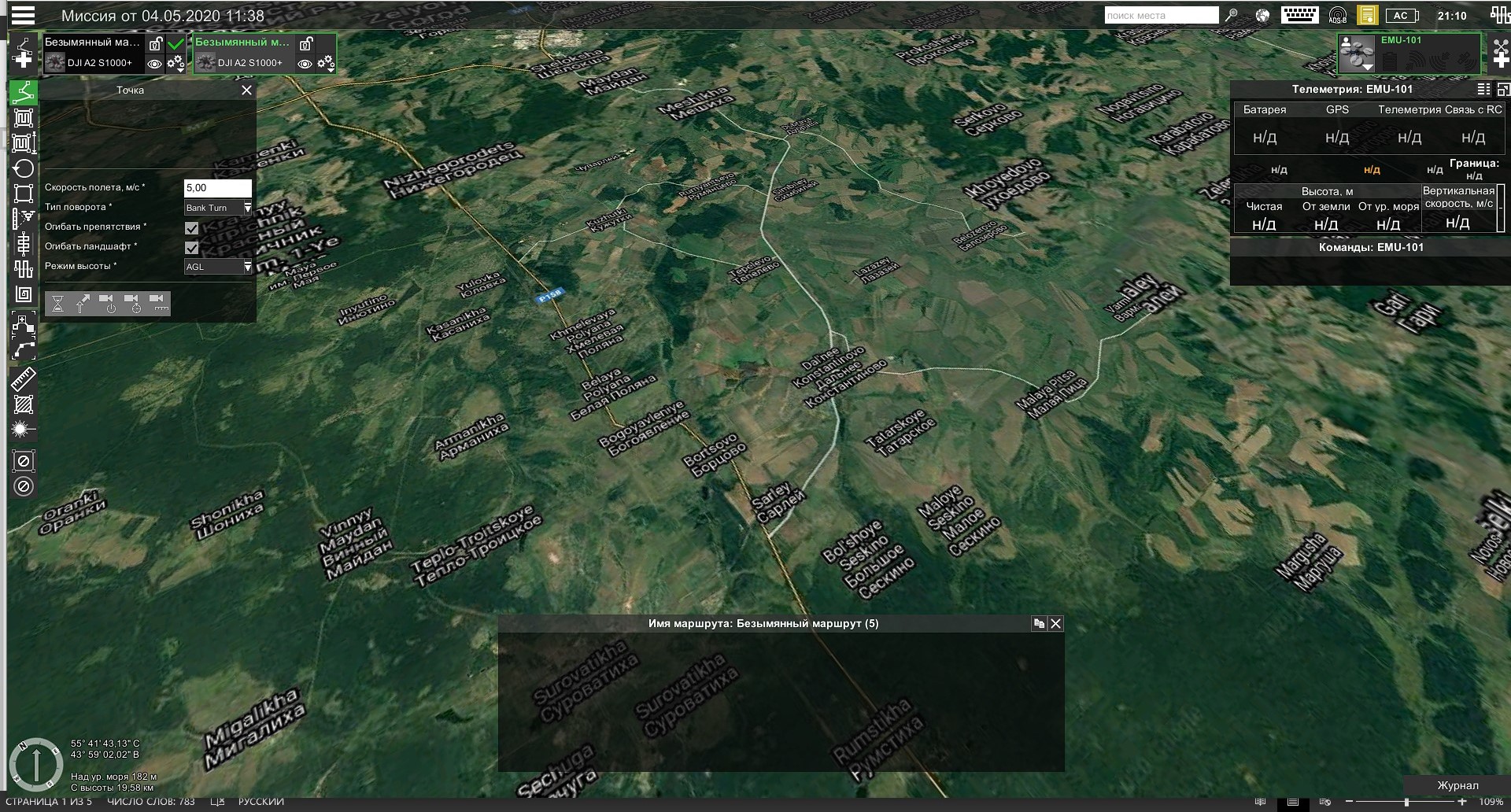
Рисунок 1 – Интерфейс UgCS
Цель съемки объекта: создание учебного полигона беспилотной аэрофотосъемки ННГАСУ.
Подготовка к работе. Планирование площадной аэрофотосъемки.
- Первым делом при создании миссии настраивается профиль квадрокоптера.В меню «Профили» выбирается модель дрона. Нажмается кнопка «Правка». Задаются необходимые параметры. Нажимается кнопка «Сохранить». Важно обратить внимание на параметр «Радиус ограды», который не позволяет планировать миссии за границами указанного радиуса.
- Создание проекта геодезической съемки. В «Главном меню» выбирается «Создать новую миссию», далее выбирается «С нуля», и определяется модель квадрокоптера (к примеру DJI Mavic 2 Pro), который будет использоваться.
Задаются первоначальные настройки проекта (рис. 2), нажимается «ОК».
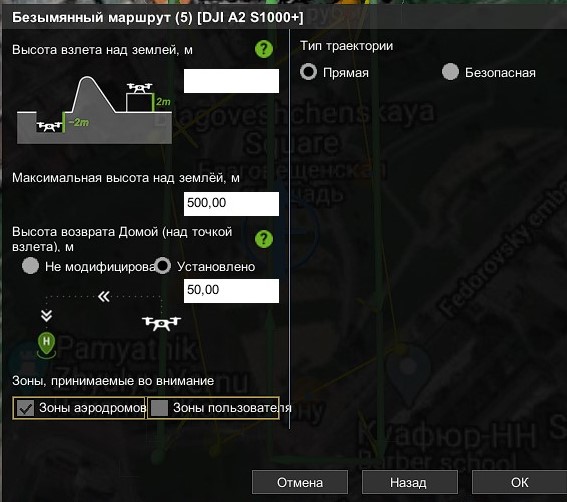
Рисунок 2 – Задание первоначальных настроек проекта
- Загрузка границ работ из KMZ или KML-файла (рис. 3). В меню «Настройка карты» выбираются «Слои карты». Затем выбирается закладка «2D объекты», нажимается кнопка «Добавить», создается новый слой и в него загружается KMZ файл с границами работ, после этого он добавляется на карту нажав кнопку «>», после чего район работ отобразится на интерактивной карте.
- Кэширование карты и рельефа местности. В меню «Настройки карты» выбирается пункт «Офлайн карта»и данные по участку работ будут доступны офлайн в полевых условиях. Также рекомендуется приготовить предварительные маршруты пока есть Интернет. UgCS закэширует карту и высотные данные «под» маршрутом, что гарантирует возможность его использования без наличия Интернет.
- Загрузка собственных ортофотопланов и рельефа. В случае, когда ситуация местности значительно изменилась, либо на участок работ отсутствует детальный рельеф, можно загрузить собственные ортофотопланы или DEM. Для загрузки используется стандартная проекция UTM, эллипсоид WGS84.
5.1. Для отображения ортофотоплана в меню «Настройки карты» выбираются «Слои карты». В закладке «Карта» создается новый источник и в него загружается ортофотоплан, после этого, чтобы сделать его активным, нажимается кнопка «>».
5.2. Для отображения DEM в закладке «Высоты» добавляется новый источник рельефа, в него загружается DEM в растровом формате и он добавляется на карту.
Теперь можно выполнять безопасное планирование полетов с учетом актуального состояния местности, что немаловажно для обеспечения высокоточной съемки и безаварийных полетов.
- Планирование геодезической миссии.
6.1. Выбирается место для начальной точки маршрута инструментом «Точка», она указывается на карте, задаются параметры скорости полета и высоты. Специалисты UgCS рекомендуют ставить первую точку маршрута максимально близко к фактической точке взлета, и задавать для нее сразу безопасную высоту с учетом окружающих препятствий, растительности и пр. Одновременно следует обратить внимание, что посадку квадрокоптера целесообразно выполнять, так же в ручном режиме, как минимум последние метры.
6.2. Выбирается «Инструмент фотограмметрии» (рис. 3), задаются параметры геодезической съемки (продольное и поперечное перекрытие, разрешение снимков, тип поворота, выбираете параметр AGL для включения функции огибания рельефа). Указываются границы района съемки на карте двойным нажатием мыши в его вершинах, для завершения рисования замыкается полигон, объединив две крайние вершины.
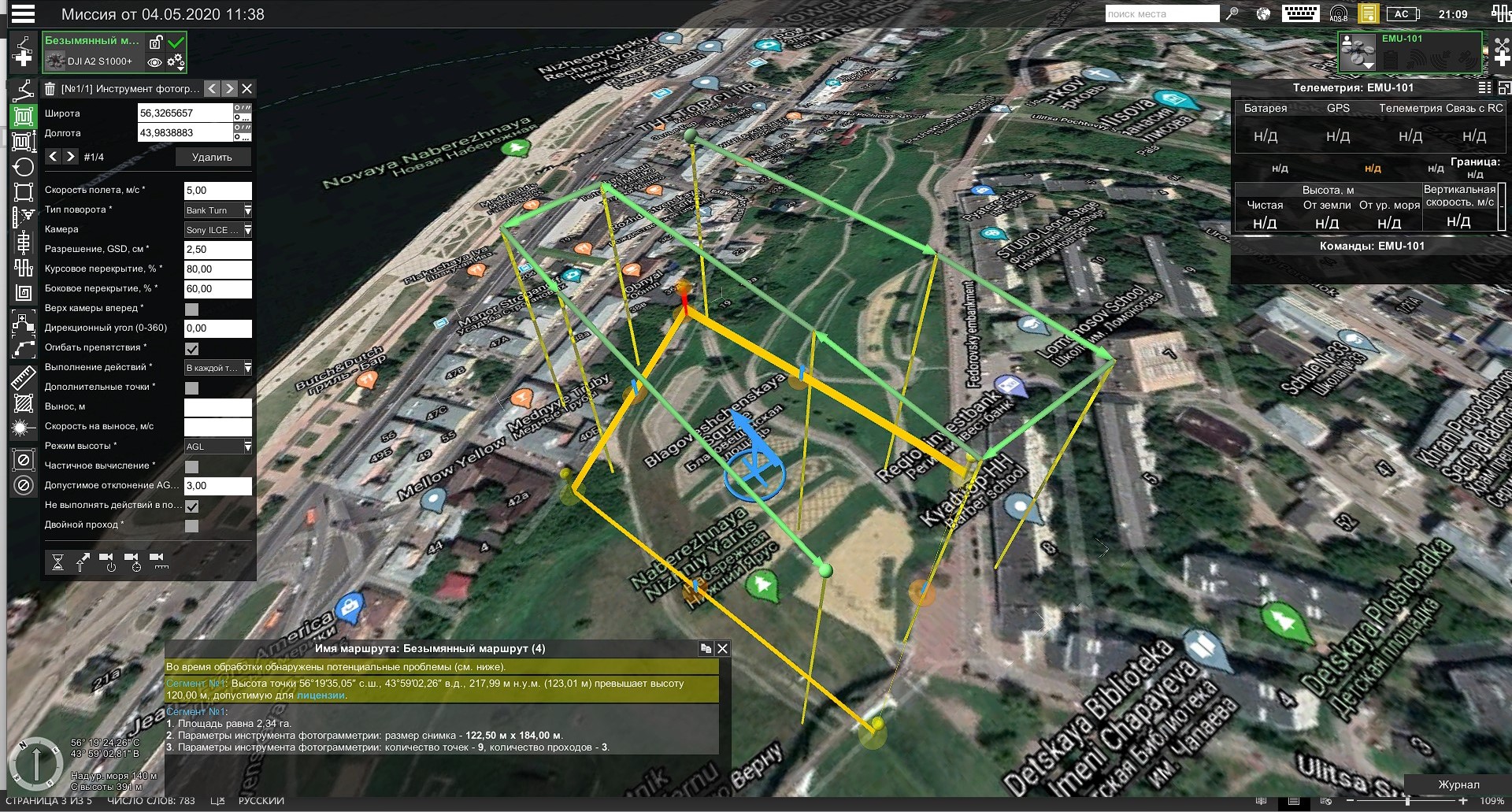
Рисунок 3 – Проектирование плана полета с помощью «Инструмента фотограмметрии»
6.3. Добавляется точка возврата «домой». Выбирается инструмент Точка и указывается её местоположение на карте, задается скорость движения на этом отрезке пути и высота.
6.4. Проверяется траектория полета, время и протяжённость. В меню «Параметры» выбирается функция «Показать рельеф» (рис. 4).
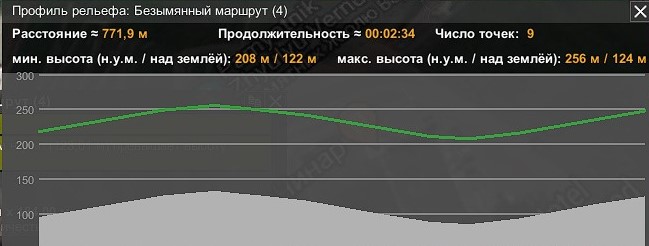
Рисунок 4 – Окно «Показать рельеф»
6.5. Планируется следующий полет. Для этого можно скопировать предыдущую миссию и переместить ее на новую территорию. В меню «Параметры» выбирается опция «Дублировать маршрут». В правом верхнем углу экрана появится новый маршрут.
В меню «Параметры» нового маршрута выбирается «Выбрать все сегменты» и маршрут перетаскивается на новое место. Также необходимо откорректировать точки начала и завершения миссии.
Таким образом, можно подготовить необходимое число маршрутов, покрывающих район интереса.
Необходимо обратить внимание на то, что можно запланировать съемку территории большей чем полет на одной батареи, и при последующих вылетах «сдвигать» первую точку маршрута в соответствии с реальным завершением предыдущего полета. Команда «Изменить точку старта».
При планировании съемки нужно учитывать общее время полета квадрокоптера для безопасного возврата домой [2].
Список использованных источников:
- Программное обеспечение UgCS // SKYMEC : [сайт]. ‒ Москва. – Обновляется в течение суток. – URL: https://skymec.ru/product/enterprise-software/ugcs/ (дата обращения: 10.10.2020). – Текст : электронный.
- Руководство по использованию UgCS Pro для выполнения профессиональной геодезической аэросъемки // TOPODRONE : [сайт]. – Москва – Обновляется в течении суток. – URL : https://topodrone.ru/news/event/rukovodstvo-po-ispolzovaniyu-ugcs-pro-dlya-vypolneniya-professionalnoy-geodezicheskoy-aerosyemki/ (дата обращения: 11.10.2020). – Текст : электронный.
- Программное обеспечение наземной станции | UgCS PC Mission Planning // UgCS : [сайт]. – Латвия. – Обновляется в течение суток. – URL : https://www.ugcs.com/ (дата обращения: 09.10.2020). – Текст : электронный