
В данной статье подробно описан процесс создания цифровой модели местности, включающий в себя послойное нанесение площадных, линейных и точечных объектов местности в программе «CREDO 3D СКАН» [1].
Перед началом создания цифровой модели местности в виде топографического плана необходимо произвести оценку облака точек лазерных отражений и его обработку для дальнейшего использования.
Вот несколько ключевых аспектов, которые необходимо учитывать при оценке качества облака точек:
Точность
Точность: оценка точности облака точек позволяет определить, насколько близко полученные данные соответствуют реальной геометрии объектов. Чем выше точность, тем качественнее будет модель окружающей среды.
Для оценки точности при выполнении полевых работ были измерены координаты контрольных точек.
Контрольные точки подгружались в проект вместе с облаком точек лазерных отражений, где с помощью инструмента «Линейка» промерялись несовпадения координат контрольных точек с координатами точек данных лазерного сканирования (Рисунок 1).

Рисунок 1 – Импорт контрольных точек
Полнота и плотность
Полнота и плотность: полнота описывает степень того, насколько облако точек охватывает все объекты в сцене, а плотность указывает на распределение точек в пространстве. Хорошее облако точек должно быть как можно более полным и плотным.
Полнота определялась визуально: просматривалось всё облако точек на наличие «дыр» — участков, где имеется недостаток информации (Рисунок 2).
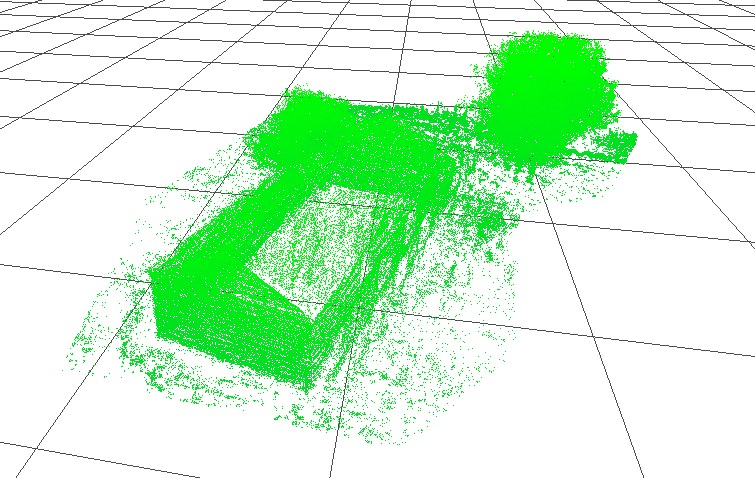
Рисунок 2 – Визуальное определение полноты данных
Плотность определялась при помощи инструмента «Линейка» путём нескольких измерений расстояний соседних точек (Рисунок 3).
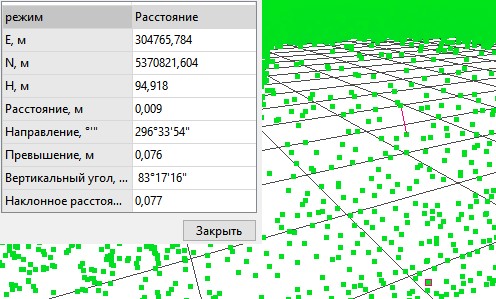
Рисунок 3 – Определение плотности облака лазерных отражений
Наличие шума
Наличие шума: шум в данных может искажать результаты обработки и восприятие окружающей среды. Поэтому важно оценить наличие шума и применить фильтрацию для его устранения.
Наличие шума определяется визуально: облако точек в 3D режиме просмотра устанавливалось таким образом, чтобы поверхность земли приблизительно установилась в горизонте. Таким образом можно определить наличие и количество точек шума, находящихся как ниже рельефа, так и выше всей ситуации (точки в таком случае находятся над самыми высокими объектами).
Согласованность данных
Согласованность данных: для обеспечения правильного воссоздания трехмерной модели окружающей среды облако точек не должно иметь пропусков или перекрытий.
Согласованность данных подразумевает отсутствие резкого изменения геометрии объекта (если это не было предусмотрено при построении архитектурных объектов), резкого разрыва в геометрии (если на местности отсутствует этот разрыв), а также повтора данных (наложение друг на друга нескольких блоков данных означает ошибку в процессе сшития сканов).
Согласованность определяется визуально (Рисунок 4).

Рисунок 4 – Проверка согласованности данных
На рисунках 5-6 приведён пример резкого разрыва в геометрии, который не указывает на несогласованность данных, так как на местности разрыв так же присутствует (повален забор за остановкой).

Рисунок 5 – Пример резкого разрыва в геометрии (облако)

Рисунок 6 – Пример резкого разрыва в геометрии (фотография)
После оценки облака точек лазерных отражений необходимо произвести его обработку и фильтрацию. Вот основные этапы обработки и фильтрации точек облака данных:
Удаление шума
Удаление шума: это процесс удаления точек, которые находятся далеко от основного облака данных и могут быть ошибочными измерениями или помехами. Это позволяет улучшить качество облака данных и повысить точность результата. Пример выбросов (шум ниже рельефа) представлен на рисунке 7.

Рисунок 7 – Шум ниже рельефа
Фильтрация таких точек осуществляется командой «Облака точек – Фильтрация точек облака – Фильтр шумов ниже рельефа».
Фильтрация изолированных точек
Фильтрация изолированных точек: процесс фильтрации точек облака, при котором выбираются участки облака с наименьшей плотностью. Обычно такие точки являются точками шума, пыли, случайно движущихся объектов. Данный инструмент является вспомогательным при поиске точек шума, а также позволяет классифицировать точки отстрелов вверх.
Прореживание облака точек
Прореживание облака точек: процесс равномерного уменьшения плотности облака точек для снижения объёма обрабатываемых данных.
Прореживание осуществляется командой «Облака точек – Фильтрация точек облака – Прореживание». Данная команда оставляет одну точку из рабочей области, размер которой зависит от заданного шага сетки.
Выделение рельефа
Выделение рельефа: процесс автоматического определения точек рельефа.
Выделение рельефа осуществляется командой «Рельеф – Выделить рельеф». В открывшемся окне можно выбрать исходные слои (рекомендуется исключить слои, содержащие точки шумов), геометрический фильтр, фильтр шума, настроить шаг сетки, минимальную высоту и пропорцию высоты и ширины.
Создание DEM-матрицы
Создание DEM-матрицы: процесс создания матрицы высот на основе облака точек (в данном случае на основе точек рельефа).
Матрица высот создается при помощи команды «Рельеф – Облако точек в DEM».
После выполнения алгоритма можно заметить дыры в матрице высот, которые указывают на недостаток информации (нехватка точек рельефа в определённой области). Устранить это можно командой «Рельеф – Интерполировать DEM». В появившемся окне настраивается максимальная дистанция интерполяции (при увеличении дистанции интерполяции снижается точность матрицы высот). Конечный результат создания матрицы высот представлен на рисунке 8.
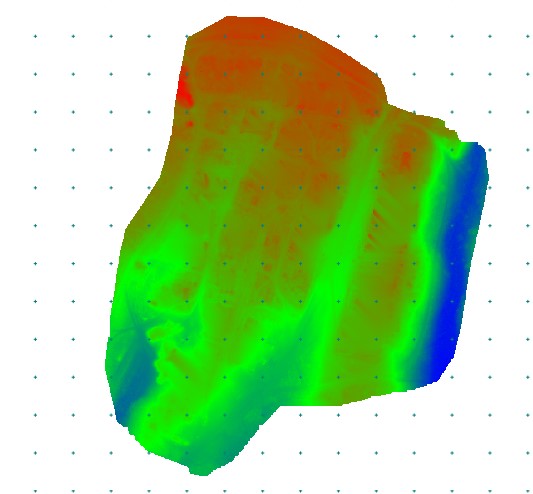
Рисунок 8 – Матрица высот
Расчёт относительной высоты
Расчёт относительной высоты: процесс расчёта высоты точек относительно выбранной матрицы высот, необходимый для дальнейшей фильтрации облака точек по пороговому фильтру.
Расчёт осуществляется командой «Облака точек – Расчёты – Рассчитать высоты относительно рельефа». В результате выполнения алгоритма в структуре точки появится поле «Относительная высота».
Пороговый фильтр
Пороговый фильтр: процесс обрезки облака точек по настраиваемым границам относительной высоты. Данный инструмент удобен в случаях, когда отрисовке объектов мешают крыши зданий и сооружений, кроны деревьев, кустарниковая растительность и прочее. Результат фильтрации по пороговому фильтру представлен на рисунке 9.
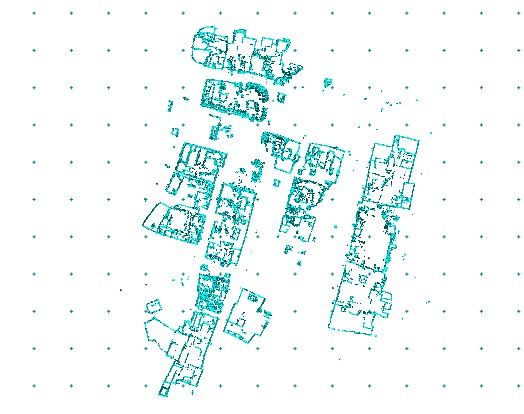
Рисунок 9 – Результат применения порогового фильтра
Облако точек в растр
Облако точек в растр: процесс конвертации облака точек путём его растрирования. Данный процесс полезен для дальнейшей отрисовке ситуации из-за наглядности и возможности отрисовки линейных объектов по середине толщины облака точек. Конвертация осуществляется командой «Облака точек – Конвертация облака – Облако точек в растр».
Далее, для распознания объектов про растру, необходимо настроить глубину цвета командой «Растры – Глубина цвета – Глубина цвета 1 бит», где ползунком добиваемся выделения всего растра. Фрагмент растрированного облака точек представлен на рисунке 10.

Рисунок 10 – Фрагмент растрированного облака точек
После фильтрации, классификации точек, а также растрирования необходимых слоёв облака точек можно приступать к созданию цифровой модели местности.
Создание цифровой модели местности заключается в поэтапной отрисовке ситуации в условных знаках и создании поверхности рельефа [2]. Условные знаки для одного и того же объекта могут отличаться в зависимости от требуемого масштаба выходной продукции. Для детализации ситуации был выбран масштаб 1:500. Условные знаки в классификаторе программы ТИМ КРЕДО 3D СКАН соответствуют общепринятым (Условные знаки для топографических планов [3]).
Создание цифровой модели местности происходит в несколько этапов:
Создание точечных объектов
Создание точечных объектов осуществляется командой «Ситуация – Создать – Создать точечный объект». В появившемся окне из классификатора выбирается условных знак объекта, а в рабочей области указывается его положение. Пример отрисованного точечного объекта представлен на рисунке 11.
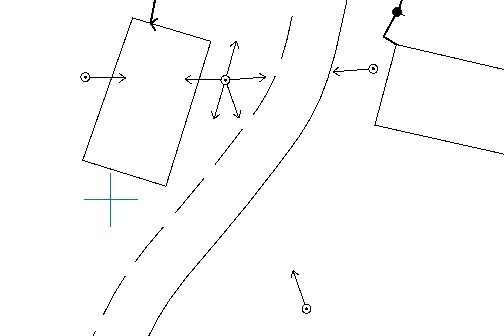
Рисунок 11 – Пример точечного объекта (столбы железобетонные)
Создание линейных объектов
Далее командой «Ситуация – Создать – Создать линейный объект» создаются линейные объекты. Отрисовка линейных объектов производится либо по растрированному облаку точек, либо по уже существующим точечным объектам. Пример отрисованного линейного объекта представлен на рисунке 12.

Рисунок 12 – Пример линейного объекта (дороги грунтовые)
Создание площадных объектов
Заключительным этапом отрисовки ситуации является создание площадных объектов при помощи команды «Ситуация – Создать – Создать Площадной объект». Площадные объекты создаются по уже существующим линейным объектам функцией «По внутренней точке». Пример отрисованного площадного объекта представлен на рисунке 13.
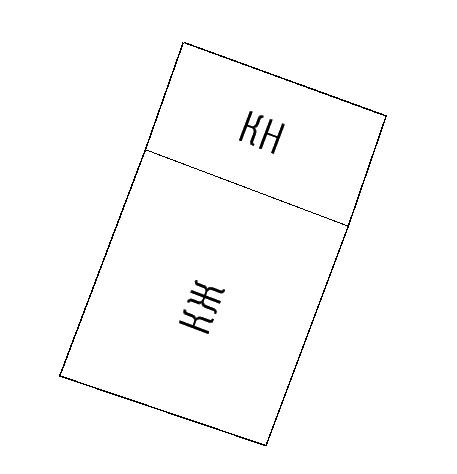
Рисунок 13 – Пример площадного объекта
Создание поверхности рельефа
После отрисовки ситуации необходимо создать поверхность рельефа по точкам класса #2 командой «Рельеф – Построить поверхность». Таким образом создается сеть треугольников с вершинами в рельефных точках. Затем следует проверить и оценить качество построения поверхности и в случае, если горизонталь имеет неправильную резкую форму – исправить с помощью инструмента «Перебросить ребро». Также добавляются подписи горизонталей и бергштрихи.
Оформление чертежа
Следующим шагом является оформление чертежа и создание текста. Выполняется это командой «Чертёж – Создать чертёж». В появившемся окне выбирается формат листа и его ориентация. В рабочей области курсором указывается точка вставки рамки чертежа.
Затем нажимаем «Выпустить чертеж» и попадаем в редактор чертежей. Здесь добавляются все необходимые подписи и оформляется штамп.
По завершению оформления чертежа сохраняем его командой «Чертеж – Экспорт – Экспорт в PDF».
Фрагмент итогового топографического плана изображен на рисунке 14.

Рисунок 14 – Фрагмент итогового топографического плана
Результат оценки качества полученных данных свидетельствует о том, что технология лазерного сканирования способна собирать максимально полную информацию об объектах ситуации.
Инструменты в ПО ТИМ КРЕДО 3D СКАН позволяют достаточно быстро и эффективно анализировать большой объём информации, устранять точки шума и, что имеет наибольшую значимость, делать модель более понятной.
Путём поэтапного создания точечных, линейных, площадных объектов и поверхности рельефа вся ситуация была отображена на цифровой модели местности.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
- КРЕДО 3D СКАН: Программное обеспечение / Технологии Кредо – URL: https://credo-dialogue.ru/produkty/korobochnye-produkty/tim-kredo-3d-scan.html (дата обращения 10.10.2024).
- 3D СКАН: Руководство пользователя — URL: https://credo-dialogue.ru/media/downloads/Documentation/3D_skan.pdf (дата обращения 10.10.2024).
- Условные знаки топографических объектов для планов масштабов. 1:5000 1:2000 1:1000, 1:500, Москва «Недра», 1989 г.